
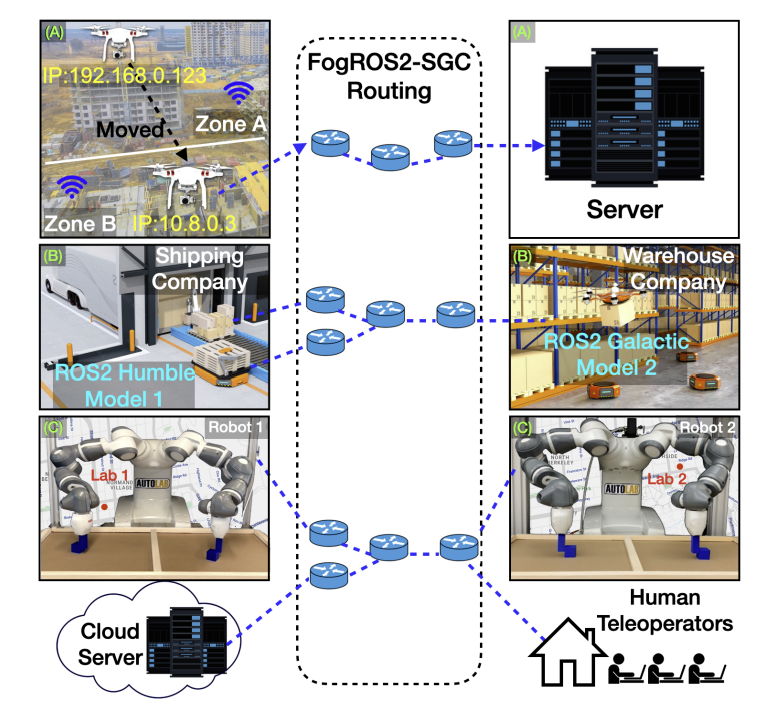
FogROS2-SGC is designed to connect robot systems across different physical locations, networks, and Data Distribution Services (DDS). It uses globally unique and location-independent identifiers to securely and efficiently route data between robotics components around the globe. This is particularly beneficial for applications such as distributed multi-robot systems, remote robot control, and mobile robots, which increasingly involve the global Internet and complex trust management.
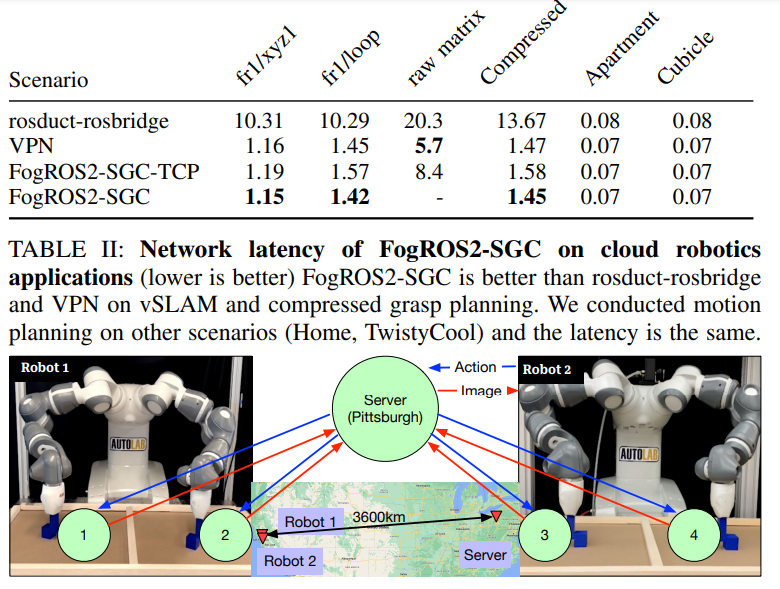
The platform is agnostic to the ROS2 distribution and configuration, compatible with non-ROS2 software, and can seamlessly extend existing ROS2 applications without any code modification. It also offers improved performance, with experiments suggesting that FogROS2-SGC is 19× faster than rosbridge, a ROS2 package with comparable features but lacking security. The platform has been applied to 4 robots and compute nodes that are 3600 km apart, demonstrating its potential for wide-scale, secure, and efficient global connectivity in robotics.
Publication date: June 29, 2023
Project Page: https://sites.google.com/view/fogros2-sgc
Paper: https://arxiv.org/pdf/2306.17157.pdf