

The paper “One-shot Imitation Learning via Interaction Warping” presents a novel method for learning robotic manipulation policies from a single demonstration. The authors propose a new approach to the point correspondence problem, which is a key challenge in robotic manipulation. This problem involves establishing a correspondence between points on the surface of objects in the demonstration and the same points on the objects seen at test time.
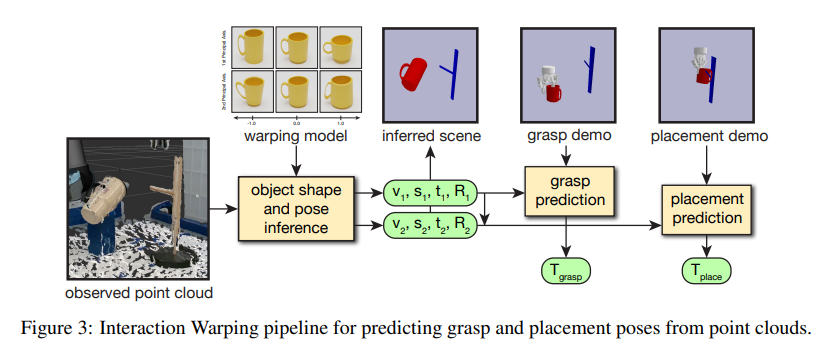
The proposed method, called Interaction Warping, is based on Coherent Point Drift (CPD), a point-cloud warping algorithm. This approach allows the authors to train a shape-completion model to register a novel in-category object instance to a canonical object model in which the task has been defined via one-shot demonstration. The canonical task can then be projected into scenes with novel in-category objects by registering the new objects to the canonical models.
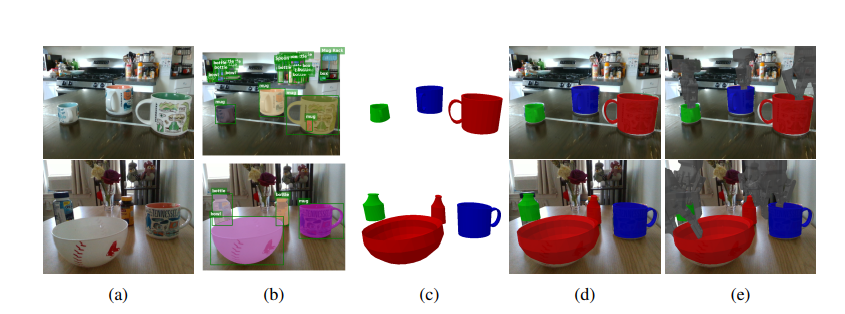
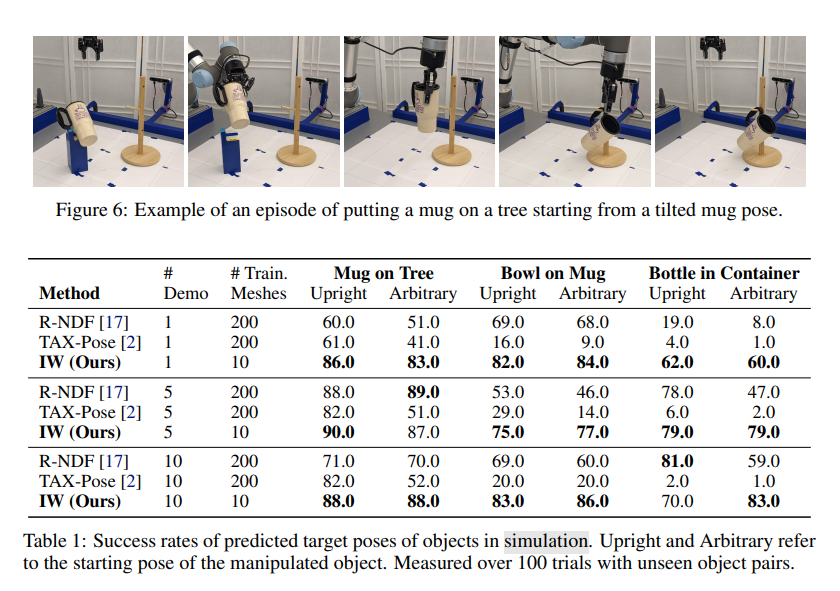
The authors demonstrate the effectiveness of Interaction Warping through one-shot imitation learning on three simulated and real-world object re-arrangement tasks. They also show the ability of their method to predict object meshes and robot grasps in the wild. This work contributes to the field of robotic manipulation by providing a new method for learning manipulation policies from a single demonstration, which could potentially improve the efficiency and effectiveness of robotic tasks.
Publication date: June 21, 2023
Project Page: N/A
Paper: https://arxiv.org/pdf/2306.12392