


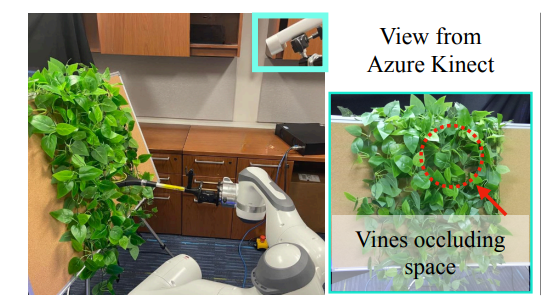
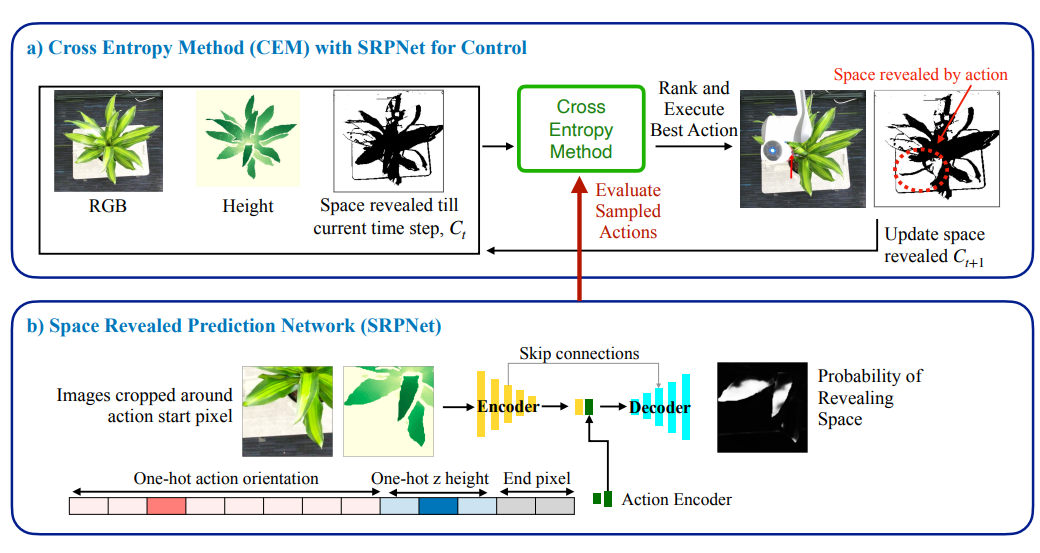

This research focuses on autonomous agriculture applications such as inspection, phenotyping, and fruit plucking, which require the manipulation of plant foliage to look behind leaves and branches. The challenges of partial visibility, extreme clutter, thin structures, and unknown geometry and dynamics for plants are addressed through data-driven methods. A neural network called SRPNet is trained using self-supervision to predict what space is revealed when a candidate action is executed on a given plant. SRPNet is used with the cross-entropy method to predict actions that effectively reveal space beneath plant foliage. The research experiments with a synthetic (vines) and a real plant (Dracaena) on a physical test-bed across five settings, including two settings that test generalization to novel plant configurations. The experiments demonstrate the effectiveness of the overall method, PPG, over a competitive hand-crafted exploration method, and the effectiveness of SRPNet over a hand-crafted dynamics model and relevant ablations.
Publication date: Jul 6, 2023
Project Page: N/A
Paper: https://arxiv.org/pdf/2307.03175.pdf
