


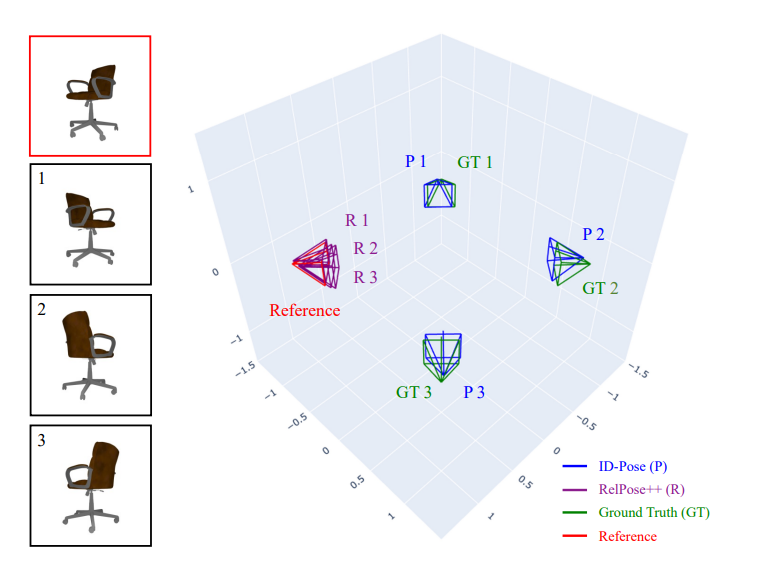
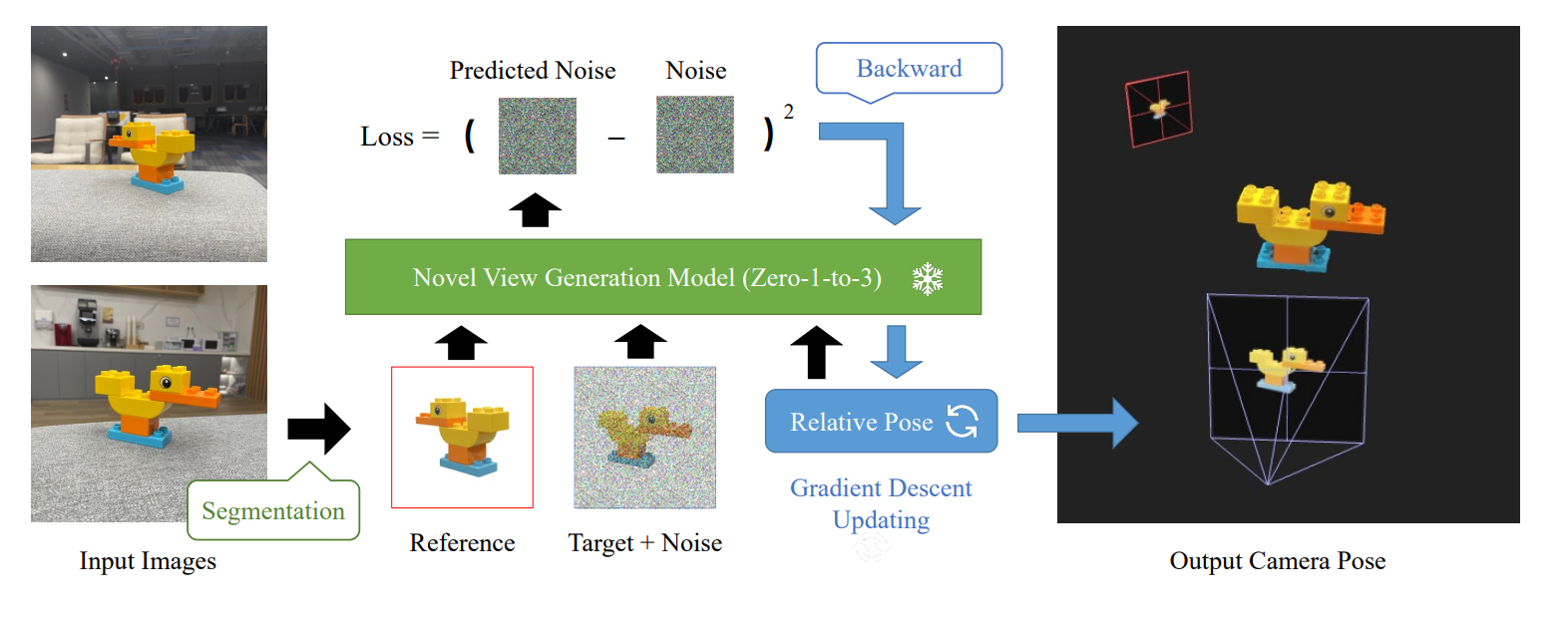

ID-Pose is a novel approach to camera pose estimation, a long-standing problem in computer vision. The method leverages a pre-trained diffusion model to estimate the relative pose of two input images. The approach adds noise to one image and predicts the noise conditioned on the other image and a decision variable for the pose. The prediction error is then used as the objective to find the optimal pose using gradient descent. ID-Pose can handle more than two images and estimate each of the poses with multiple image pairs from triangular relationships. The method requires no training and generalizes to real-world images. Experiments using high-quality real-scanned 3D objects show that ID-Pose significantly outperforms state-of-the-art methods.
Publication date: Jun 29, 2023
Project Page: https://xt4d.github.io/id-pose/
Paper: https://arxiv.org/pdf/2306.17140.pdf
